1,745 Views
1,745 Viewsหุ่นยนต์อาจแยกได้เป็น ๒ ประเภทใหญ่ๆ คือ หุ่นยนต์ใช้ในบ้าน (domestic robot) และหุ่นยนต์อุตสาหกรรม (industrial robot)
หุ่นยนต์ใช้ในบ้าน เริ่มมีการใช้กันบ้างในต่างประเทศ เช่น ใช้ทำงานดูดฝุ่น ทำความสะอาดบ้าน เปิดประตูต้อนรับแขก และยกอาหารจากครัวมายังโต๊ะอาหาร เป็นต้น
เมื่อเทียบกับหุ่นยนต์ใช้ในบ้านแล้ว หุ่นยนต์อุตสาหกรรมมีความสำคัญ และมีการใช้แพร่หลายมากกว่า จึงจะขอกล่าวถึงหุ่นยนต์อุตสาหกรรมโดยละเอียด

ความก้าวหน้าของเทคโนโลยีทางคอมพิวเตอร์ นำไปสู่การพัฒนา และความรุ่งเรือง ของระบบเศรษฐกิจและสังคม
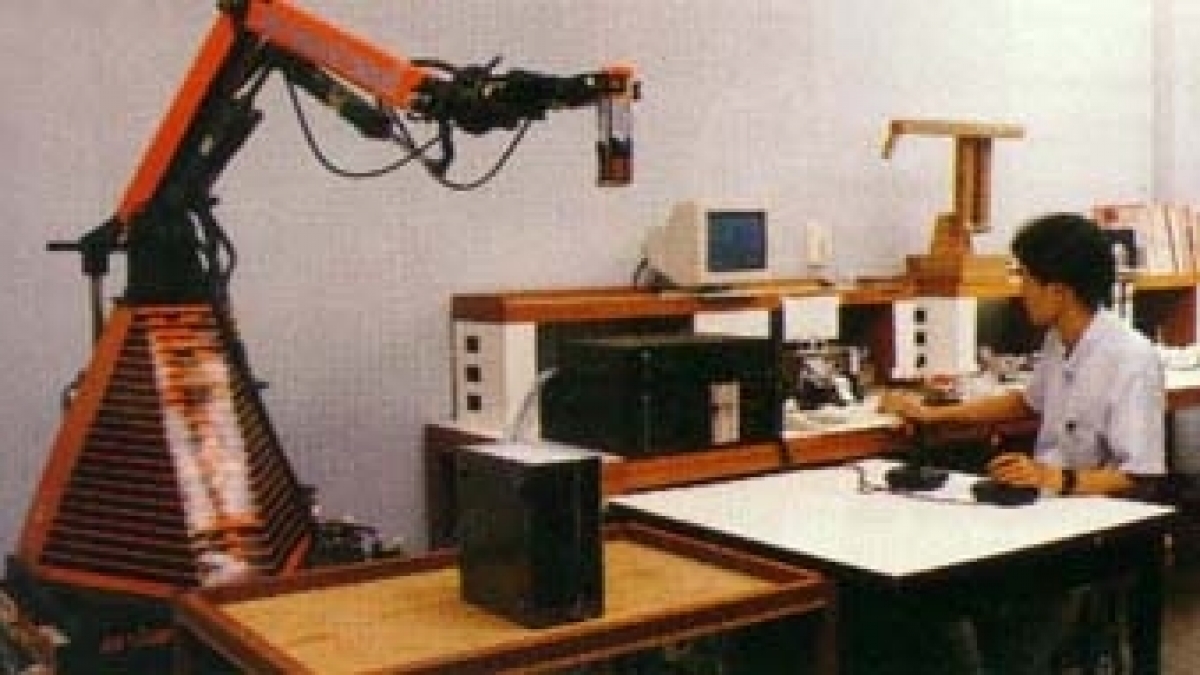
หุ่นยนต์อุตสาหกรรม เป็นอุปกรณ์ที่สร้างขึ้น เพื่อเลียนแบบการทำงานของอวัยวะส่วนบนของมนุษย์ ประกอบด้วยระบบที่สำคัญ ๒ ระบบ คือ ระบบทางกลของหุ่นยนต์ (mechanism system) และระบบควบคุมหุ่นยนต์ (control system)
ระบบทางกลของหุ่นยนต์อุตสาหกรรม ประกอบด้วยอุปกรณ์ที่ใช้จับ หยิบเคลื่อนย้ายและหมุนได้อย่างอิสระใน ๒ มิติ หรือ ๓ มิติ ระบบทางกลของหุ่นยนต์ควรมีความมั่นคง และมีน้ำหนักน้อย เพื่อประหยัดพลังงานในการเคลื่อนไหว

ระบบควบคุมหุ่นยนต์ ประกอบด้วยอุปกรณ์ควบคุม ซึ่งควบคุมการทำงานของหุ่นยนต์โดยอัตโนมัติ ด้วยคอมพิวเตอร์ นับเป็นส่วนสำคัญที่สุดของหุ่นยนต์ ระบบควบคุมนี้ทำหน้าที่เป็นสมองเก็บข้อมูล สั่งหุ่นยนต์ให้ทำงาน ตรวจสอบ และควบคุมรายละเอียดของการทำงานให้ถูกต้อง
มนุษย์ได้ประดิษฐ์หุ่นยนต์อุตสาหกรรมขึ้น เพื่อช่วยการทำงานประเภทต่างๆ ที่สำคัญดังต่อไปนี้
๑. งานที่ต้องเสี่ยงภัย และเป็นอันตรายต่อสุขภาพ เช่น งานในโรงงานยาฆ่าแมลง โรงงานสารเคมีต่างๆ และโรงงานเชื่อมโลหะที่มีความร้อนสูง เป็นต้น
๒. งานที่ต้องการความละเอียด ถูกต้อง และรวดเร็ว เช่น โรงงานทำฟันเฟืองนาฬิกา โรงงานทำเลนส์ กล้องถ่ายรูป หรือกล้องจุลทรรศน์ เป็นต้น
๓. งานที่ต้องทำซ้ำๆ ซากๆ และน่าเบื่อหน่าย เช่น โรงงานประกอบรถยนต์ โรงงานประกอบวงจรเบ็ดเสร็จ หรือไอซี และโรงงานทำแบตเตอรี่ เป็นต้น
เพื่อความอยู่รอดของมนุษย์ท่ามกลางการพัฒนา และขยายตัวของสังคม ทำให้มนุษย์ต้องพยายามคิดประดิษฐ์ และพัฒนาสิ่งอำนวยความสะดวก และเครื่องมือต่างๆ เพื่อเพิ่มปริมาณการผลิตให้เพียงพอ สำหรับการอุปโภค และบริโภค ดังนั้นจะเห็นได้ว่า นับวันเครื่องมือพื้นฐานจะได้รับการปรับปรุงให้มีความสามารถทำงานได้สะดวก ถูกต้อง และรวดเร็วยิ่งขึ้น อันเป็นที่มาของการใช้หุ่นยนต์ และอุปกรณ์อื่นๆ ที่ควบคุมอัตโนมัติ ด้วยคอมพิวเตอร์ ในปัจจุบัน
การพัฒนาเทคโนโลยีเครื่องจักรกล เพื่อให้หุ่นยนต์มีความสามารถเฉพาะตัวมากยิ่งขึ้น สามารถแบ่งได้เป็นลำดับขั้นดังนี้
การพัฒนายุคที่ ๑
เป็นยุคของเทคโนโลยีพื้นฐานในยุคนี้หุ่นยนต์สามารถทำงานในจังหวะ "หยิบ" และ "วาง" ชิ้นงานได้เท่านั้น ระบบการขับเคลื่อนหุ่นยนต์เป็นระบบไฮดรอลิก (hydraulic) หรือระบบนิวแมทิก (pneumatic) เป็นส่วนใหญ่ และใช้สวิตช์ตำแหน่ง (limit switch) เป็นอุปกรณ์ควบคุมตำแหน่ง โดยทั่วไปจะพบได้ในเครื่องกลึงอัตโนมัติ ในยุคนี้หุ่นยนต์มีขอบเขตการทำงานค่อนข้างจำกัด
การพัฒนายุคที่ ๒
จากเทคโนโลยียุคแรก การเปลี่ยนแปลงการทำงานของหุ่นยนต์ค่อนข้างจำกัด และยุ่งยาก เกิดการพัฒนาการใช้อุปกรณ์ขับเคลื่อนที่เรียกว่า เซอร์โว (servo mechanism) เพื่อให้สามารถควบคุมหุ่นยนต์ และเปลี่ยนแปลงชุดคำสั่งไว้
การพัฒนายุคที่ ๓
เป็นยุคของหุ่นยนต์ที่ใช้กันอยู่ในปัจจุบัน หุ่นยนต์เหล่านี้ได้รับการออกแบบให้สามารถตัดสินใจได้ โดยไม่ขึ้นอยู่กับชุดคำสั่งที่ป้อน แต่ขึ้นกับสัญญาณที่ได้รับจากอุปกรณ์รับสัญญาณ เช่น กล้องวีดิทัศน์ เมื่อรับภาพของชิ้นงาน จะแปรเป็นสัญญาณส่งกลับเข้าไปในส่วนควบคุม ส่วนควบคุมจะปรับสภาวะของหุ่นยนต์ให้เหมาะสมกับความจริง เช่น การใช้หุ่นยนต์หยิบชิ้นส่วนอิเล็กทรอนิกส์ใส่ตามรูเจาะ โดยใช้กล้องช่วยมอง เพื่อให้หุ่นยนต์สามารถทำงานได้อย่างถูกต้องแม่นยำ